- INITIATION AUX MICROCONTROLEURS
- Introduction
- 1. Notions de base
- 2. Instructions if, for, while, switch-case. Terminal série
- 3. Variables, tableaux, ports, opérations logiques
- 4. Fonctions, Arduino, machines à état
- 5. Tables, moyennes, timers, EEPROM
- 6. Logique, timers, SPI, I2C
- 7. Moteurs, servos, capteurs, multitâche
- 8. Liens MOOC

Le texte équivalent pour Energia/MSP430G se trouve sous http://www.pyr.ch/coursera/LC2-msp.pdf
2. Instructions if, for, while, switch-case. Terminal série
2.1 Avertissement
Ce document correspond aux exercice libres de la semaine 2 du MOOC Coursera “Comprendre les Microcontrôleurs”. Il ne recouvre qu’une partie des notions présentées dans les vidéos, le but de nos exemples étant d’aller en profondeur avec chaque notion.
Le document www.didel.com/coursera/LC1.pdf doit être étudié auparavant pour s’habituer à notre approche “C”, différente des tutoriels Arduino.
Si vous êtes débutants, vous devez savoir néanmoins reconnaître les touches spéciales sur votre clavier, créer des fichiers, les sauver sur le disque, les compiler et les exécuter.
Pour se concentrer sur la fonctionnalité des programmes, les sources sont à disposition: www.didel.com/coursera/LC2ino.zip.
Gérer vos dossiers et programmes est important, voir www.didel.com/coursera/GestionCroquis.pdf
Vous avez vu les vidéos. En quelques minutes on a parcouru beaucoup d’instructions et on vous a fait croire que c’est simple. C’est effectivement simple quand on a assimilé !
Notre approche pour apprendre le C, les facilités d’Arduino et se familiariser avec les problèmes dits “temps réel”, passe par beaucoup d’exercices-exemples simples à modifier.
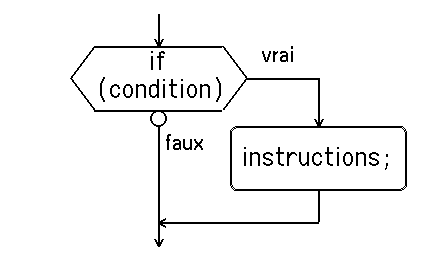
2.2 Instruction if
if (condition) {
instructions;
}
Si la condition est vraie, les instructions sont exécutées
Exemple 2.21
Reprenons l’exemple LcCopy.ino vu précédemment, renommé A221.ino et que vous trouvez dans le dossier LC2ino que vous venez de créer.
Ajoutez un délai de 1 seconde avant ou après Led1On. ( delay (1000); vu dans LC1)
Que va-t-il se passer ? Vérifiez.
//A221.ino Copie P1 sur L1
. . . définitions et set-up
void loop () {
if (Pous1On) {
Led1On;
}
if (Pous1Off) {
Led1Off;
}
}
Exemple 2.22
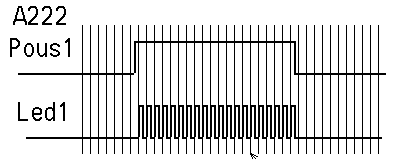
On a supprimé le 2e if de l’exemple précédent. L’intensité lumineuse est faible quand on presse. Pourquoi ?
Si chaque instruction et le retour prend 1 microseconde, la led1 est allumée quel pourcentage du temps quand on pèse ? Ajouter un délai de 0.1 s à différents endroits, et prévoir ce qui va se passer avant d’exécuter.
//A222.ino P1 -> Led1, éteint automatique
. . . définitions et set-up
void loop () {
if (Pous1On) {
Led1On;
}
Led1Off;
}
Exemple 2.23
Un poussoir allume, l’autre éteint.
Mettre un retard de 2 secondes après Led1On (delay (2000);). Quelle conséquence sur le poussoir 2 ?
//A223.ino P1 allume, P2 éteint
. . . définitions et set-up
void loop () {
if (Pous1On) {
Led1On;
}
if (Pous2On) {
Led1Off;
}
}
Exemple 2.24
Clignoter L1 si on pèse sur P1 En pesant plus ou moins fréquemment, l’impulsion ne vient pas toujours. Pourquoi ?
//A224.ino Clignote si P1
. . . définitions et set-up
void loop () {
if (Pous1On) {
Led1On; delay (1000);
Led1Off; delay (1000);
}
}
Un diagramme des temps peut être très représentatif pour suivre les actions des instructions


2.25 Complément
Ecrivons l’instruction qui inverse l’état de la Led L1. Cela nous évitera, pour simplement clignoter, d’écrire deux lignes on-off.
Il faut lire l’état de la led, ce que l’on sait faire, c’est comme lire un poussoir :
digitalRead (L1)
Il faut ensuite inverser cet état avec le signe ! qui en C signifie inverser la valeur booléenne qui suit :
!(digitalRead (L1))
Cette expression a une valeur qui vaut 0 ou 1, que l’on peut utiliser pour écrire sur la led :
digitalWrite (L1,!digitalRead(L1))
On peut alors ajouter la macro Led1Toggle :
#define Led1Toggle digitalWrite (L1,!digitalRead(L1))
et économiser une ligne dans le programme A224 :
if (Pous1On) {
Led1Toggle; delay (1000);
}
A noter que maintenant que le signe d’inversion booléen est connu, on n’a plus besoin de la macro Pous1Off. On écrira !Pous1On.
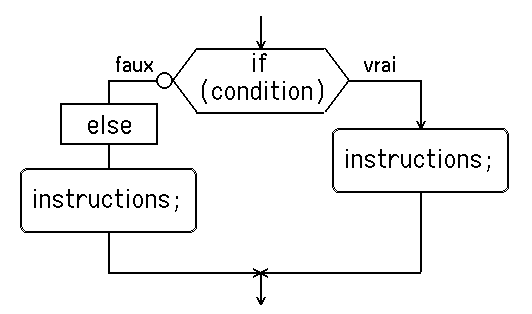
2.3 Instruction if – else
if (condition) {
instructions;
}
else {
instructions;
}
Si la condition est vraie, des instructions sont exécutées, autrement c’est un autre groupe d’instructions qui est exécuté.
Exemple 2.31
Ce programme A231 est-il équivalent au programme A221 ? Comparez les tailles des programmes. (Arduino prend 500-600 bytes pour se lancer et utiliser les fonctions pinMode etc).
//A231.ino Copie P1 sur L1
. . . définitions et set-up
void loop () {
if (Pous1On) {
Led1On;
}
else {
Led1Off;
}
}
Exemple 2.32
On veut que la Led1 s’allume seulement si on presse sur P1 et P2 simultanément.
Pour exprimer un ET logique entre deux états, le C utilise le signe &&.
Tester le signe || (OU logique) que l’on verra plus tard.
//A232.ino L1 si P1 –ET- P2
. . . définitions et set-up
void loop () {
if (Pous1On&&Pous2On) {
Led1On;
}
else {
Led1Off;
}
}
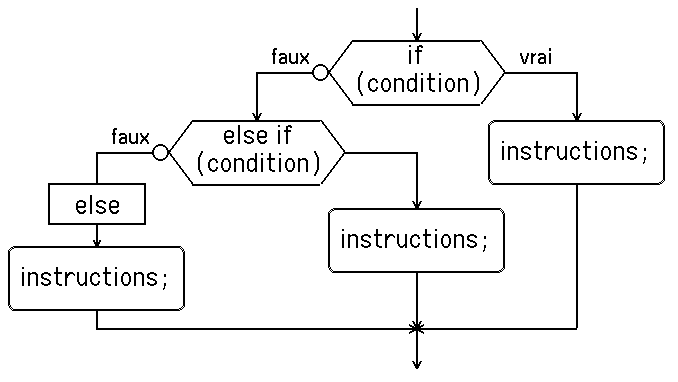
2.4 Instruction if – else if – else if – else
if (condition) {
instructions;
}
else if (condition) {
instructions;
}
else if . . .
else . . .
Cette instruction est peu utilisée. Dans les cas ou il y a plusieurs choix, le switch case que l’on verra est plus élégant.
Exemple 2.41
Modifier le programme A241 pour que P1 joue le rôle d’alarme, c’est-à-dire une fois L1 allumé par P1, il faut faire un reset pour éteindre L1
Sauver ce programme sous le nom A241b.ino
Variante: P2 éteint L1 (quittance l’alarme).
Peut-on enlever le else final ?
//A241.ino P1 allume L1, P2 allume L2
. . . définitions et set-up
void loop () {
if (Pous1On) {
Led1On;
}
else if (Pous2On) {
Led2On;
}
else {
Led1Off;
Led2Off;
}
}
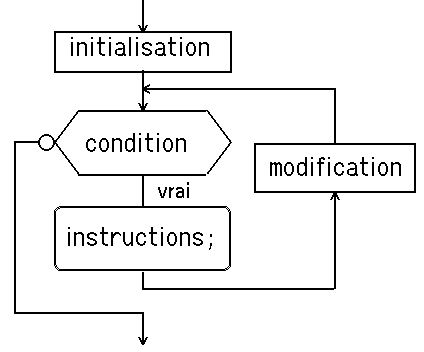
2.5 Boucle for
for (init ; cond ; modif) {
instructions;
}
// Exemple: on veut clignoter 20 fois
for (int i=0; i<20; i++;) {
Led1On; delay (200);
Led1Off; delay (200);
}
delay (4000);// avant de recommencer
Que penser de cette instruction que l’on voit dans certains programme ?
for(;;);
On initialise rien, la condition est toujours vraie, pas de modification, pas d’instruction.
On tourne en boucle indéfiniment sans rien faire ! Comme while (1) {}.
La boucle for est pratique pour répéter une action un certain nombre de fois. Dans sa forme simple elle utilise une variable locale i (par exemple un compteur 16 bits de type int). Pour répéter une période de 1 ms 100 fois, donc jouer une note, on écrit :
for (int i=0 ; i<100; i++) {
HPOn; delayMicroseconds(500);
HPOff; delayMicroseconds(500);
}
Exemple 2.51
On veut entendre un La normal (440 Hz) sur le Haut-parleur.
On joue le son 2 secondes, et on s’arrête 2 secondes. On calcule que la demi-période est de 1000000/440/2 = 1136 microsecondes. Il faut répéter 44022 = 1760 fois la demi-période pour que cela dure 2 secondes.
La taille du code est 1282 octets (sur mon PC).
//A251.ino
. . . définitions et set-up
void loop () {
for (int i; i<1760; i++) {
HPToggle;
delayMicroseconds (1136);
}
delay (2000);
}
On doit demander au compilateur de faire ces calculs, il fera moins de fautes !
Dans ce premier cas, le compilateur calcule les constantes qui seront utilisées.
Modifier le programme (A251b n’est pas sur le zip)
Cette écriture est naturellement la seule correcte; on ne doit pas voir des valeurs numériques dans un programme ! (sauf les délais qui sont de la cosmétique).
Vous avez bien pris l’habitude de sauver sous un nouveau nom les variantes de programme ?
//A251b.ino
. . . définitions et set-up
int dureePeriode = 1000000/440/2;
int nbPeriodes = 440*2*2;
void loop () {
for (int i; i<nbPeriodes; i++) {
HPToggle;
delayMicroseconds (dureePeriode);
}
delay (2000);
}
Modifions encore en demandant au processeur (et pas au compilateur) de calculer la période et la durée.
Le compilateur est assez malin pour ne pas faire le calcul chaque fois, se sont des constantes.
Mais si on déclare int la=440; et on écrit for (int i; i<la*2*2; i++) { .. le calcul se fait chaque fois (la variable pourrait changer) et la durée est augmentée de 50 microsecondes. Faites suivre les deux variantes de boucles for, et vous entendrez la différence !
//A251c.ino 2 secondes de "La normal"
. . . définitions et set-up
void loop () {
for (int i; i<440*2*2; i++) {
HPToggle;
delayMicroseconds (1000000/440/2);
}
delay (2000);
}
Exemple 2.52
Programmons une sirène dont le son monte.
Il faut deux boucles for imbriquées, pour jouer plusieurs fois la même période avant de la modifier. NbPeriodes fixe la vitesse d’évolution.
PerMin PerMax les périodes extrêmes.
Modifiez ces valeurs pour écouter des infra et ultrasons.
Ajouter une 2e boucle for pour diminuer la période
(p-- pour diminuer de 1).
Vous pouvez ajouter/soustraire des valeur >1 pour entendre les escaliers de fréquence (augmenter aussi le nombre de périodes répétées)
//A252.ino sirene
. . . définitions et set-up
#define PerMin 500
#define PerMax 1000
#define NbPeriodes 10
void loop () {
for (int p=900; p<1000; p++) {
for (int i=0; i<NbPeriodes; i++) {
HPToggle; delayMicroseconds (p);
}
}
}
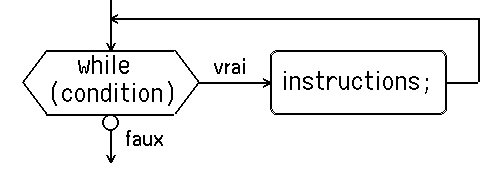
2.6 Instruction while
while (condition) {
instructions;
}
Tant que la condition est vraie, les instructions sont exécutées
Il faut bien voir la différence entre le if, qui teste et passe plus loin, et le while, qui boucle tant que la condition n’est pas vraie. On dit que le while est “bloquant”, le processeur est bloqué dans la boucle while () à attendre que la condition soit vraie.
Si le processeur n’a rien d’autre à faire qu’attendre que l’on presse sur un bouton, ce n’est pas gênant.
Rappelons que while(1){} est utilisé pour terminer un programme : le processeur tourne en boucle à ne rien faire d’utile. Il faut faire un reset pour redémarrer le programme.
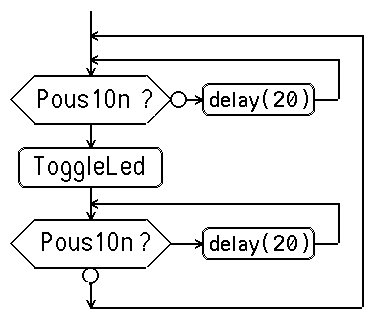
Exemple 2.61
On veut allumer et éteindre une Led avec un seul poussoir. Il faut attendre que l’on presse, puis que l’on relâche.
On remarque le rond d’inversion dans l’organigramme qui veut dire “faux” et qui se traduit par le ! du C.
Le délai de 20ms évite les rebonds de contact.
//A261.ino
. . . définitions et set-up
void loop () {
while (!Pous1On) {
delay (20);
}
Led1Toggle;
while (Pous1On) {
delay (20);
}
}
Modifier ce programme pour avoir une minuterie d’escalier : la led s’allume pour 10 secondes à chaque pression.
Dans ce cas, peut-on utiliser un if ?.
Remarque: Ce programme a un risque de mauvais fonctionnement. Il peut arriver exceptionnellement que !Pous1On soit échantillonné dans un rebond très court qui fait que le Pous1On qui suit est aussi vrai. Il n’y a pas d’attente, donc un basculement de trop (programme correct en 2.72).
Exemple 2.62
On veut maintenant démarrer et arrêter un clignotement avec le poussoir. Pendant le clignotement on ne peut pas se bloquer sur le poussoir. On teste à chaque LedToggle si on peut continuer.
Le cahier des charges demande que la Led1 soit éteinte si elle ne clignote pas et que cela ne clignote pas au démarrage. Modifier le programme pour que ce soit le cas.
//A262.ino clignote on/off
. . . définitions et set-up
void loop () {
while (!Pous1On) { // attend pression
delay (10);
}
while (Pous1On) { // attend relachement
delay (100);
Led1Toggle;
}
while (!Pous1On) { // attend pression
delay (100);
Led1Toggle;
}
while (Pous1On) { // attend relachement
delay (10);
}
}
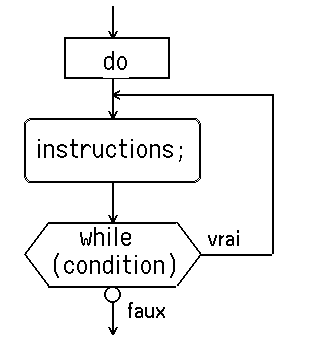
2.7 Instruction do while
do {
instructions;
}
while (condition);
Avec le while, si la condition est vraie, on continue sans avoir exécuté les instructions. C’est parfois gênant.
Les instructions sont d’abord exécutées, et ensuite la condition est testée.
Attention aux accolades et ;
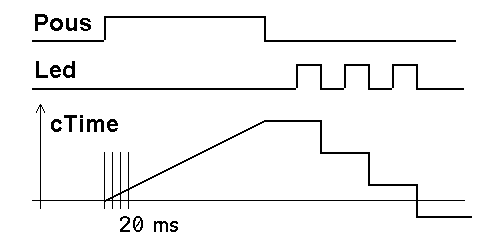
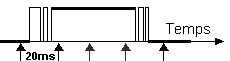
Exemple 2.71
On veut clignoter pour une durée proportionnelle à la durée de l’action sur un poussoir. On compte toute les 20ms pendant l’action.
On divise par 50 pour avoir le nombre d’impulsions. Il faut au moins une impulsion, même ce temps est court (on pourrait ajouter 1 et mettre un while au lieu du do..while).
//A271.ino Cligno variable
. . . définitions et set-up
int compteDuree;
void loop () {
while (!Pous1On) {
delay (20);
}
compteDuree = 0;
while (Pous1On) {
delay (20);
compteDuree++;
}
compteDuree /= 50; // division
do {
Led1On; delay (200);
Led1Off; delay (200);
compteDuree--;
}
while (compteDuree>0) ;
}
Modifier le programme pour utiliser l’instruction Led1Toggle en gardant la même fréquence de clignotement.
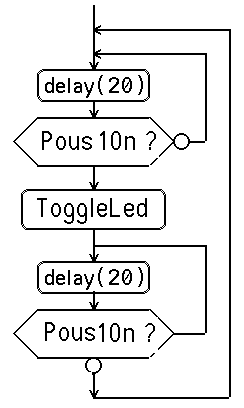
Exemple 2.72
L’exemple 2.61 a mis en évidence un problème assez subtil. Si on lit un signal avec rebonds, il faut s’assurer qu’il y ait toujours un délai entre 2 décisions.
Le programme 2.62 a-t-il le même problème potentiel ? Si oui, il faut le corriger.
//A272.ino
. . . définitions et set-up
void loop () {
do {
delay (20);
} while (!Pous1On);
Led1Toggle;
do {
delay (20);
} while (Pous1On);
}
2.8 switch case
L’idée du switch case est de faciliter la programmation d’une suite de tâche. Je fais ceci. Quand c’est fini (compteur à zéro par exemple) ou s’il y a un signal qui s’active, je passe à la tâche suivante. Les cas sont numérotés, on verra plus tard comment les nommer. Il ne doit pas y avoir d’instruction bloquante dans un switch-case (sauf pour des temps courts).
La fonctionnalité est riche et la syntaxe apparaît compliquée. Dans la forme simplifiée présentée maintenant :
int etat=1; // on définit une variable cas et on décide que le premier cas est numéroté 1
switch (etat) { // on se réfère à cette variable qui va prendre différentes valeurs
case 1: // pas d’accolade! On aligne les instruction et on termine avec break;
case 2: // on écrit etat=1; par exemple pour retourner à l’état 1
}
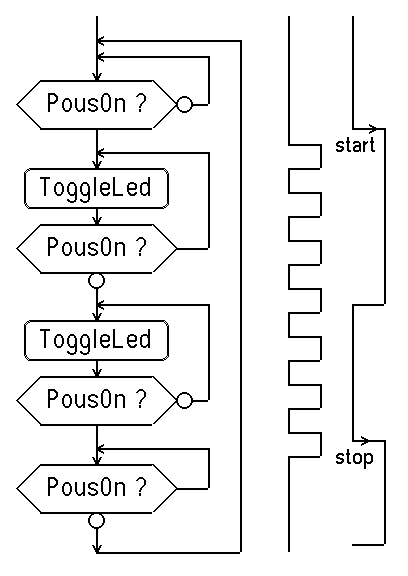
Exemple 2.81
Reprenons l’exemple 2.61 qui a un état dormant et un état clignotant. Il faut dédoubler ces états pour décoder la transition du poussoir.
On voit que la lisibilité est bonne, les commentaires ne sont pas nécessaires.
Modifier le programme pour que l’on doive presser 2 fois sur le poussoir pour obtenir le clignotement.
5 fois ? – avec une variable compteur, pas avec une boucle for bloquante !
//A281.ino clignote on/off avec switch case
#define L1 4
#define Led1Toggle digitalWrite (L1,!digitalRead(L1))
#define Led1Off digitalWrite (L1,0);
#define P1 2 // actif à 0
#define Pous1On (digitalRead (P1)==0) // actif à 0V
void setup() {
pinMode (L1,OUTPUT);
pinMode (P1,INPUT);
DDRC = 0xFF;
}
int etat=1;
void loop () {
delay (20); // inutile de le répéter dans chaque cas!
switch (etat) {
case 1: // on attend
if (Pous1On) {
etat = 2;
}
break;
case 2: // on commence tout de suite à clignoter
Led1Toggle; delay (100);
if (!Pous1On) {
etat = 3;
}
break;
case 3: // on continue jusqu’à ce que l’on presse
Led1Toggle; delay (100);
if (Pous1On) {
Led1Off;
etat = 4;
}
break;
case 4: //on attend le relâchement
if (!Pous1On) {
etat = 1;
}
}
}
2.9 Terminal série
Le terminal série sera expliqué dans une vidéo de la semaine 4. On va se limiter ici à sa fonctionnalité couramment utilisée pour afficher des textes et variables, aider à la mise au point. Pour plus de détails voir www.didel.com/C/Terminal.pdf.
Dans le set-up, il faut dire que l’on va communiquer avec l’écran et préciser la vitesse de transfert. Dans le programme, on lance les affichages.
Serial.begin (9600); // débit standard de 9600 bits/s
Serial.print ("texte"); // affiche une chaine sans saut de ligne
Serial.print (valeur); // affiche une valeur en décimal
Serial.print (valeur, DEC); Serial.print(valeur, HEX); Serial.print(valeur, BIN);
// attention, les zéros non significatifs sont effacés: (0b00010100,BIN) est affiché 10100
Serial.println(); // l’affichage est suivi d’un saut de ligne
Pour voir l’écran terminal, il faut cliquer sur l’icone “Moniteur série”.
Le HP est connecté sur la ligne Tx, et chaque transfert excite le HP avec un bruit qui signale que le téléchargement se fait, mais est désagréable lorsqu’il y a des transferts réguliers. Un commutateur permet de désactiver le haut-parleur.

Exemple 2.91 Compter et décompter en 8 bits.
On veut utiliser P1 pour compter et P2 pour décompter. On a vu comment attendre sur un poussoir. Il y en a deux maintenant. Avec des if, il faut balayer pour voir quel poussoir est actif, et se bloquer dessus pour attendre le relâchement dans un while. On affiche sur le terminal la valeur à chaque action. Comptez et décomptez, observez le passage par zéro.
Le type short int correspond à un mot de 8 bits signé. byte est un nom équivalent. On inventorie les types dans LC3.pdf.
//A291.ino P1 compte, P2 décompte
. . . définitions et set-up
short int compteur;
void loop () {
if (Pous1On) {
delay (10); compteur++;
Serial.println (compteur);
while (Pous1On) {delay (10); }
}
if (Pous2On) {
delay (10); compteur--;
Serial.println (compteur);
while (Pous2On) {delay (10); }
}
}
Changeons de type de donnée.
Si on déclare byte compteur; on passe de 0 à 255 en décomptant.
Si on déclare int compteur; on passe de 0 à -1.
Si on déclare unsigned int compteur; on passe de 0 à 65535.
Si on déclare char compteur; cela n’affiche rien ! Le type char est traité spécialement.
Mais short int compteur; affiche –1 quand on décompte de zéro.
Exemple 2.92 Saturation
Le programme A291 est modifié pour que la valeur ne dépasse pas 5.
On aurait pu écrire
if (compteur > 5) {
compteur=5;
}
Mais si on modifie il faut changer le 5 à 2 endroits !
Ajouter les instructions pour saturer à 0, pour saturer à –1.
Quelle est la réaction si on sature à –1 avec un type “unsigned”.
//A292.ino P1 compte, P2 décompte saturé
. . . définitions et set-up
short int compteur;
void loop () {
if (Pous1On) {
delay (10); compteur++;
if (compteur > 5) {
compteur--;
}
Serial.println (compteur);
while (Pous1On) {delay (10); }
}
if (Pous2On) {
delay (10); compteur--;
Serial.println (compteur);
while (Pous2On) {delay (10); }
}
}
Exemple 2.93
Serial.print supprime les zéros non significatifs selon notre habitude scolaire. Les nombres sont en binaire dans la mémoire. Par défaut, ils sont convertis et affichés en décimal.
Le programme montre comment afficher un texte et un nombre dans différents formats.
Pour afficher les zéros non significatifs, c’est facile d’écrire une boucle for.
Le signe << décale à gauche (semaine 3)
+= additionne le 2e terme,
<<=1 décale de 1 bit
Remplacer int val2 = 0x0006; par int val2 = 0xC006;
Bizarrement notre type int est transformé en type long avec extension du signe (semaine 3), puisque 0xC006 est négatif.
//A293.ino Affichage de nombres différents formats
. . . définitions et set-up
void setup() {
Serial.begin(9600);
}
int val = 45;
int val2 = 0x0006;
void loop() {
Serial.print(val);
Serial.print(" bin ");
Serial.print(val,BIN);
Serial.print(" hex");
Serial.println(val,HEX);
Serial.println("com\npte ");
for (byte i=0;i<15;i++) {
Serial.print(i);
}
Serial.print("\n"); // comme Serial.println();
Serial.print(val2);
Serial.print(" bin ");
Serial.print(val2,BIN);
Serial.print(" hex ");
Serial.println(val2,HEX);
for (int i=0; i<16;i++) {
if ((val2 & 0x8000) == 0) {
Serial.print("0");
}
else {
Serial.print("1");
}
val2<<=1; // décale à gauche
}
while (1) {} // reset pour recommencer
}
2.10 Résumé
On a vu les instructions
if (condition) { instructions; }
for (init ; cond ; modif) { instructions; }
while (condition) { instructions; }
do { instructions; } while (condition) ;
switch (variable) case: . . .
Leur bonne utilisation nécessite de la pratique. Il faut en particulier bien savoir repérer les parties bloquantes des programmes.
jdn 140505/141107