- INITIATION AUX MICROCONTROLEURS
- Introduction
- 1. Notions de base
- 2. Instructions if, for, while, switch-case. Terminal série
- 3. Variables, tableaux, ports, opérations logiques
- 4. Fonctions, Arduino, machines à état
- 5. Tables, moyennes, timers, EEPROM
- 6. Logique, timers, SPI, I2C
- 7. Moteurs, servos, capteurs, multitâche
- 8. Liens MOOC

Le texte équivalent pour Energia/MSP430G se trouve sous http://www.pyr.ch/coursera/LC4-msp.pdf
4. Fonctions, Arduino, machines à état
4.1 Librairies
Mettons dorénavant toutes les définitions dans un fichier avec l’extension h. La procédure d’adjonction d’une librairie locale, qui permet de couper un programme en parties indépendantes est documenté sous www.didel.com/coursera/FichiersInclus.pdf
Créer des librairies générales suppose des connaissances de C++ et une grande expérience. Nous n’aborderons pas ce sujet, mais nous aurons l’occasion d’utiliser, donc documenter, quelques librairies Arduino.
Les sources des exemples sont à disposition sous www.didel.com/coursera/LC4ino.zip
Exemple 4.11
//A411.ino Clignote et bippe
#include "LcDef.h"
void setup () {
LcSetup ();
}
// Tous nos fichier utilisant le LeanCbot auront
// ce début, avec comme différence pour
// le MSP un #include "LcMSPDef.h"
|
void loop () {
Led1On; delay(300); Led1Off;
Led2On; delay(300); Led2Off;
Led3On; delay(300); Led3Off;
Led4On; delay(300); Led4Off;
for (int i=0; i<1000; i++) {
HPToggle; delayMicroseconds (600);
}
}
|
4.2 #define et fonctions
Avant d’apprendre à écrire des fonctions, comprenons bien comment on peut se référer à des actions en C. La possibilité de faire la même chose de façon différente est toujours troublante pour le débutant.
Pour allumer nos leds, on a abondamment utilisé l’instruction Led1On;, résultant d’un
#define Led1On digitalWrite (L1,1)
Le précompilateur fait une simple substitution de caractères pour que le programme soit lisible et plus facilement portable.
On peut aussi définir une fonction sans paramètre
void DoLed1On () {
digitalWrite (L1,1); // ou bitSet (PORTD,bL1);
}
Mais dans ce cas, l’appel doit mettre en évidence qu’il n’y a pas de paramètre : il faut écrire DoLed1On(); pour allumer la Led1.
Attention, si on oublie la parenthèse dans un appel de fonction, le compilateur ne signale rien et l’exécution ne se fait pas !
Les instructions de la fonction sont mises dans un coin de la mémoire, en dehors du programme, et à chaque appel, le programme saute dans la fonction (routine) et revient à la boucle principale (ou dans une fonction appelante) avec la tâche effectuée.
On peut définir une fonction plus générale pour allumer l’une des quatre Leds, avec un paramètre qui est le no donné à la Led
void DoLedOn (byte nn) {
if (nn==1) { digitalWrite (L1,1); }
if (nn==2) { digitalWrite (L2,1); }
if (nn==3) { digitalWrite (L3,1); }
if (nn==4) { digitalWrite (L4,1); }
}
Pour allumer la Led1, il faut écrire DoLedOn(1);
On peut créer une fonction encore plus générale avec 2 paramètres, le 2e paramètre disant si la Led est On (1) ou Off (0). Pour allumer la Led1 il faut écrire DoLed(1,1);
C’est facile d’écrire la fonction DoLed( , ) avec des if supplémentaires pour décider si on écrit 1 ou 0 dans le bit sélectionné.
Ceci doit vous faire penser au digitalWrite (pin, niveau); La fonction Arduino en librairie utilise une vingtaine d’instructions pour agir sur le bon bit du bon port. Vous pouvez écrire cette fonctions avec ce que vous savez, mais il faudra une quarantaine de if !
4.3 Variables locales et globales
Il faut bien comprendre la différence entre les variables globales et les variables ou paramètres locaux. Une variable globale est définie pour toute la suite du programme. Une bonne pratique est de les regrouper devant le loop,
Une variable locales ne peut être utilisée que dans la fonction ou le bloc où elle est définie. Leur intérêt est d’économiser de la place en mémoire en réutilisant les mêmes positions en mémoire physique pour des variables qui ne sont pas utilisées en même temps.
On a vu par exemple dans une boucle for que le compteur appelé traditionnellement i a un type déclaré dans la boucle: On écrit for (int i=0; i< 4; i++) { .. }.
Le compilateur réserve une position mémoire de 16 bits pour ce compteur, seulement pendant que les instructions entre { } sont exécutées, et cette position mémoire sera affectée à une autre variable locales plus loin. Le nom i pourra aussi être réutilisé, c’est un nom local qui n’a pas besoin d’être expressif.
Par contre les noms globaux, que l’on retrouve dans différentes pages du programme, doivent être expressifs; des mois plus tard, on doit savoir immédiatement ce qu’ils signifient.
4.4 Fonction avec des paramètres en entrée
La forme générale est void FaireCeci (type1 param1, type2 param2) { ... instructions; ... }
Le nombre de paramètres n’est pas limité mais s’il dépasse 2, on ne sait en général plus dans quel ordre ils sont sans aller consulter la documentation !
Une majuscule commence le nom d’une fonction, et ce nom doit exprimer au mieux la fonctionnalité, un verbe est utilisé de préférence. Arduino ne respecte pas toujours cette règle, le C ne fait aucune vérification. Le type de chaque paramètre doit être précisé, même si c’est le même que le précédent.
Exemple 4.41
|
La fonction La fonction utilise deux boucles imbriquées, la boucle interne est calibrée à 1 ms. Les variables Chronométrez 60 clignotements. |
//A441.ino Fonction FaireDelay (ms); #include "LcDef.h"
void setup () {
LcSetup (); }
#define Pour1ms 840 // calibré avec un chronomètre
void FaireDelai (int dd) {
for (int i=0; i |
Exemple 4.42
|
On veut voir sur la Led1 des salves de clignotement de plus en plus longues. On utilise la fonction Modifier ce programme pour que la durée soit une variable globale, comme dans l’exemple précédent, et pas une constante |
//A442.ino| Salves de clignotement
#include "LcDef.h"
void setup () {
LcSetup (); }
#define DurCligno 200 // ms
void ClignoteNFoisLed1 (byte nn) {
for (byte i=0; i |
Exemple 4.43
|
La fonction Les contraintes typographique nous empêchent d’utiliser des noms très explicites, mais vous remarquez que le nom choisi donne l’ordre des paramètres pour éviter les erreurs d’inattentions. |
//A443.ino| On varie la durée et le nombre #include "LcDef.h"
void setup () {
LcSetup (); }
void CliNFoisDurLed1 (byte nn, int dd) {
for (byte i=0; i
|
4.5 Fonction avec un paramètre en sortie
La fonction va rendre un paramètre. Par exemple une fonction qui lit un capteur rend la valeur de ce capteur et il n’a pas de différence avec lire une variable: mesure = LitTempérature();
La forme générale est
type PrendreCeci (type param1, type2 param2) {
type var ;
instructions ;
return var ;
}
On comprend enfin ce que void voulait dire: jusqu’à présent, il n’y avait pas de paramètre en entrée !
A l’appel de la fonction, le compilateur doit réserver de la place en mémoire; il faut dire combien de bytes, donc annoncer le type de ce que l’on veut.
Ensuite, une variable var de même type doit être déclarée pour rendre le résultat. L’instruction clé est la dernière: return var; qui définit ce qui est rendu par la fonction. La fonction rend une valeur numérique que l’on transfère ou teste.
On peut retourner une valeur sans déclarer une variable pour rendre le résultat: l’exemple bien connu est la fonction multiplication
long Multiplie (int aa, int bb) {
return (aa \* bb) ;
}
Plus simple:
byte Quatre () {
return 4;
}
Vous permet d’écrire ensuite
toto = Quatre(); // ne pas oublier les(), c’est une fonction, et pas une définition
Exemple 4.51
|
Arduino documente une fonction Cette fonction est facile à écrire. Pour la tester, utilisons le terminal dans un mode ou le clavier du PC permet de taper deux nombre décimaux séparés par une virgule et terminés par un retour à la ligne. Cliquer dans le rectangle du haut.avant de taper les 2 nombres. Ils sont stockés dans une tables et envoyés quand il y a le retour à la ligne. Pour les détails, voir |
// A451 Min (a,b)
void setup() {
Serial.begin(9600);
}
// fonction GetMin (a,b)
long GetMin (long a, long b) {
long rr;
if (a>b) {rr=b;}
else {rr=a;}
return rr;
}
byte valA, valB, valMin;
void loop() {
while (Serial.available() > 0) {
valeurA = Serial.parseInt();
valeurB = Serial.parseInt();
Serial.print(valA); Serial.print(" ");
Serial.print(valB); Serial.print(" min = ");
valMin = GetMin (valeurA, valeurB);
Serial.println(valMin);
}
}
|
Arduino propose aussi les fonctions suivantes faciles à programmer.
max (a,b) rend la valeur la plus grande entre a et b (pour un type signé, -3 < 1)
constrain (x,a,b) qui rend x si x>a ET x<b, a si x<a et b si x>b
La documentation sur les fonctions Arduino se trouve en tapant “Arduino mot-clé” dans un browser. Une liste résumée se trouve dans notre aide-mémoire www.didel.com/C/Resume.pdf
Exemple 4.52
|
La fonction Arduino La fonction La lecture d’une pin analogique en l’air est différente d’un reset à l’autre et c’est ce que l’on utilise en général. Ici, la valeur est prédéfinie (=22) et a été choisie pour que la combinaisons à reconnaître apparaisse quelques fois au début. Le programme affiche un motif sur les 4 leds. Il faut agir sur P2 dans la seconde si et seulement si les deux leds vertes sont allumées
Changez la graine (seed) et observez. |
//A452 Jeu de réflexe
#include "LcDef.h"
void setup () {
LcSetup ();
Serial.begin (9600);
randomSeed (22);
}
byte motif;
void loop () {
motif = random (16) ;
Serial.println (motif);
PORTD = motif << 4;
delay (1000);
if (PORTD == 0b01100000) {
if (Pous2On) { // on clignote si on a fait juste Serial.println (" bravo");
for (byte i=0 ; i< 10; i++) {
Led2Toggle; Led3Toggle; delay (200); }
}
else {
Serial.println (" rate");
}
}
}
|
Exemple 4.53
|
La fonction Arduino
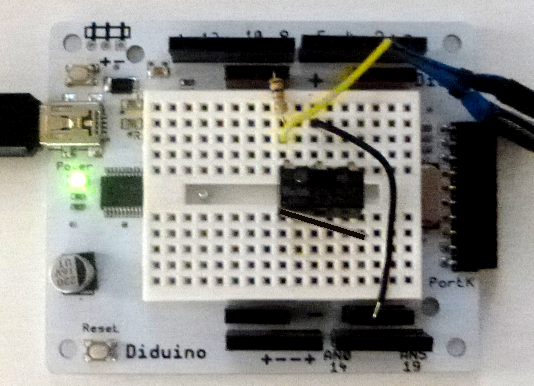
C’est donc facile par soustraction de connaître la durée d’un événement. Le programme mesure la durée du premier contact du poussoir P1. Si c’est un rebond, on verra un temps court. Après ce premier contact, un délai de 1 s laisse le temps de relâcher la touches, en ignorant les contacts suivants. Le problème est de trouver un poussoir qui a des rebonds ! Les poussoirs du LearnCbot n’en ont pas ! |
//A453 Mesure du 1er rebonds
#include "LcDef.h"
void setup () {
LcSetup ();
Serial.begin (9600);
}
long tempsDeb ;
long duree;
void loop () {
while (!Pous1On) { }
tempsDeb = micros();
// attend on // attend off
while (Pous1On) { }
duree = micros() - tempsDeb;
Serial.println (duree);
delay (1000);
}
|
Il faut connecterà la place du LearnCbot un gros commutateur ou un microswitch avec une résistance pull-up. Celui de la photo donne assez systématiquement un premier rebond de 8 à 20 µs avec des dizaines qui suivent sur 0.5 ms.
|  |  |
4.6 Fonctions bloquantes et non bloquantes
Avec une fonction bloquante, le programme ne va pas continuer tant que l’on n’est pas sorti de la fonction, ce qui est gênant si on doit en parallèle surveiller des capteurs ou asservir la vitesse d’un moteur.
Les fonctions de clignotement que l’on a vue précédemment sont bloquante, Le for et le while sont bloquants. Le loop() Arduino n’est pas du C. On doit écrire while (1) qui bloque dans une boucle éternelle.
Pour clignoter sans bloquer, il faut une fonction où à chaque passage on progresse dans un comptage de temps. On change l’état de la led quand le comptage est terminé.
Dans une application qui surveille des capteurs et actionneurs, on doit enchaîner des fonctions non bloquantes.
Exemple 4.61
|
On veut clignoter deux leds à des vitesse différentes. Ecrivons deux fonctions qui seront exécutées toutes les 20 ms. Pour une seconde, on passe 25 fois par la fonction avant de changer. La variable |
//A461 Clignote L1 et L2
#include "LcDef.h"
void setup () {
LcSetup (); }
void CliLed1 (byte pp) {
static byte cntLed1;
if (cntLed1++ > pp) {
cntLed1 = 0;
Led1Toggle;
}
}
void CliLed2 (byte pp) {
static byte cntLed2;
if (cntLed2++ > pp) {
cntLed2 = 0;
Led2Toggle;
}
}
void loop () {
delay (20);
CliLed1 (1000/25); // 1Hz
CliLed2 (200/25); // 5HZ
}
|
Exemple 4.62
|
Si on ne veut pas la contrainte des 20 ms, on peut utiliser l’horloge On mémorise le temps. On remesure le temps chaque fois que l’on passe dans la fonction. Si le temps écoulé est supérieur à la durée de clignotement, on clignote et réactive la mémorisation. Au démarrage du programme A noter que s’il y a un retard dans la boucle, la durée de clignotement sera influencée. Essayez avec le |
//A462 Clignote via millis()
#include "LcDef.h"
void setup () {
LcSetup (); }
void CliMilliLed1 (int dd) {
static int debCli1;
if (millis() > debCli1+dd) {
Led1Toggle;
debCli1 = millis();
}
}
void CliMilliLed2 (int dd) {
static int debCli2;
if (millis() > debCli2+dd) {
Led2Toggle;
debCli2 = millis();
}
}
void loop () {
CliMilliLed1 (100);
CliMilliLed2 (1000);
// delay (300);
}
|
On peut encore clignoter par interruption. Le programme active une variable durée. Si cette durée est nulle, cela ne clignote pas. On fera l’exercice quand on comprendra les interruptions et les timers.
La fonction Arduino millis(); utilise un timer par interruption pour mettre à jour la valeur rendue, mais peu connaissent les détails. Il ne faudrait par ailleurs surtout pas la modifier.
Action selon des poussoirs
Pour compter les actions sur un poussoir, dans les exercices A272 et A291 on attendait sur le relâchement avec un while bloquant. L’exercice A292 demandait une modification délicate.
|
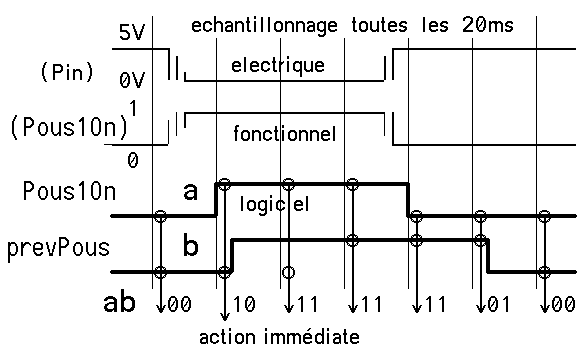
C’est plus propre de suivre de façon non bloquante l’évolution du signal. On l’a fait dans l’exemple A3111 pour surveiller les deux poussoirs en même temps. Le signal |
|
Exemples 4.63
|
Incrémentons un compteur à chaque action sur le P1 comme on l’a déjà fait. La variable Une action on-off sur le poussoir est plus lente qu’un transfer |
//A463 Compte à chaque pression
#include "LcDef.h"
void setup () {
LcSetup ();
Serial.begin (9600);
}
byte prevPous1; int compte;
void loop () {
delay (20);
if (Pous1On && (prevPous1==0)) {
compte++;
Serial.println (compte);
}
prevPous1 = Pous1On;
}
|
|
Dans l’exemple ci-dessus, l’action est immédiate ; cela ne peut pas toujours être le cas. Il faut alors mémoriser que la touche a été pressé dans un flag, un sémaphore qui reste actif. Comme le train qui laisse un sémaphore activé même quand il a fini de passer sur le capteur. Ce flag est remis à zéro par un autre signal quand la voie est libre. |
|
Exemples 4.64
|
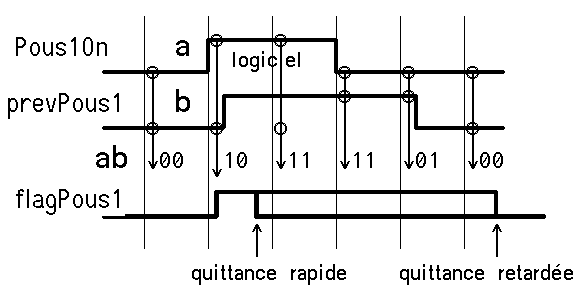
Avec le programme ci-contre, P1 allume L1 et compte. P2 quittance. On voit bien 3 tests indépendants : - s’il y a transition on active le flag - si le flag est actif on allume - si on presse on éteint et clear le flag (diviser pour régner est une méthode informatique) Peut-on permuter les if ? |
//A464.ino P1 allume L1, P2 quittance
#include "LcDef.h"
void setup () {
LcSetup (); }
byte prevPous1;
byte flagPous1;
void loop () {
delay (20);
if (Pous1On && (prevPous1==0)) {
flagPous1=1;
}
prevPous1=Pous1On;
if (flagPous1) {
Led1On; }
if (Pous2On & flagPous1) {
Led1Off;
flagPous1=0;
}
}
|
4.7 Switch - case
La construction switch – case permet d’écrire des programmes faciles à écrire et à dépanner. On l’a déjà vue en section 2.8 dans sa forme la plus simple.
|
Le principe est de se débrancher selon l’état d’une variable, et cela remplace une série de Les cas possibles sont numérotés, le numéro du cas intéressant est stocké dans une variable. |
byte cas;
switch cas {
case 5: // la variable cas a la valeur 5
. . . instructions à exécuter;
break;
case 2:
...
default:
}
|
On remarque que la syntaxe est particulière. Tous les cas sont dans une même accolade. et chaque cas est terminé par le cas suivant. L’instruction break; fait sortir du switch, donc de l’analyse des cas. Quand le processeur entre dans le switch, il regarde la valeur de la variable associée et saute pour exécuter ce cas. S’il n’existe pas, il passe aux instructions sous default.
La construction enum permet de donner à ces cas numérotés des noms qui clarifient la documentation.
enum {toto,titi,tata} var=titi; donne aux trois noms les valeurs 0,1,2 et initialise la variable var à la valeur titi (cela ne nous intéresse plus de savoir que c’est 1).
Notez que les noms sont entre accolade.
Par exemple pour un robot on va déclarer
enum {Stop,Avance,Recule,Tourne} etatRobot=Avance;
Le programme passe à travers le switch pour décider de la commande des moteurs. Un obstacle va changer la valeur etatRobot et le prochain passage par le switch (etatRobot) appellera les instructions pour éviter l’obstacle.
Exemple 4.71
|
Reprenons l’exemple des 2 poussoirs qui ici commandent des clignotements. Avec une approche top-down, on voit un système à 3 état: Poff, P1 pressé, P2 pressé; (on ignore en première étape la simultanéité).
Complétez le programme selon l’état en pointillé. Si P1 et P2 sont pressé ensemble, mettre le compteur à zéro. Notez l’utilisation du mot “ensemble” et pas “simultané”. |
//A471.ino Clignotes selon P1 P2 #include "LcDef.h"
void setup () {
LcSetup; }
. . fonctions CliLed1 CliLed2 voir ex A461
enum {Poff,P1,P1} etat=Poff;
void loop () {
delay (20);
switch (etat) {
case Poff:
if (Pous1On) { etat = P1; }
if (Pous2On) { etat = P2; }
break;
case P1:
CliLed1(1000/25);
if (!Pous1On) {
Led1Off;
etat = Poff; }
break;
case P2:
CliLed2(200/25);
if (!Pous2On) {
Led2Off;
etat = Poff;
}
break;
}
}
|
Exemple 4.72
|
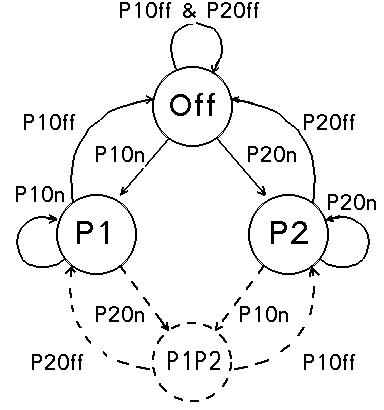
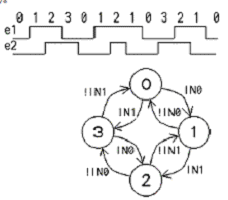
Prenons l’exemple d’un encodeur que l’on trouve dans les souris mécaniques et dans les encodeurs rotatifs qui ressemblent et remplacent de plus en plus les potentiomètres. Les deux signaux d’un encodeur sont déphasés de + ou – 90 degrés.
2 signaux, 2 bits, 4 états. Dans chaque état, on peut tourner dans un sens ou dans l’autre, l’état futur dépendra du bit qui change. Le graphe d’état ci-dessus documente tous les cas. Il n’y a plus qu’à écrire la structure Pour tester avec le LearnCbot, on utilisera P1 et P2, activés selon le diagramme des temps plus haut. Le compteur/décompteur est affiché sur le terminal. |
//A472.ino Encodeur testé avec P1 P2 #include "LcDef.h"
void setup () {
LcSetup ();
Serial.begin (9600); }
enum {e0,e1,e2,e3} next = e0; int pos=0 ;
void loop() {
switch(next) {
case e0:
if (P1On) {pos++; next = e1; break;} if (P2On) {pos--; next = e3; break;} break;
case e1:
if (P2On) {pos++; next = e2; break;} if (!P1On) {pos--; next = e0; break;} break;
case e2:
if (!P1On) {pos++; next = e3; break;} if (!P2On) {pos--; next = e1; break;} break;
case e3:
if (!P2On) {pos++; next = e0; break;} if (P1On) {pos++; next = e0; break;} break;
}
Serial.println (pos); }
|
Que penser des rebonds de contact ? Ils font osciller entre deux états et ne perturbent pas le comptage global.
Remarque
Avec ce paquet de notions, le plus dur est passé.
Il reste à exercer les tables et vous verrez ensuite que comprendre les interruptions, les timers et les interfaces série n’est pas si difficile.
jdn 140518