- INITIATION AUX MICROCONTROLEURS
- Introduction
- 1. Notions de base
- 2. Instructions if, for, while, switch-case. Terminal série
- 3. Variables, tableaux, ports, opérations logiques
- 4. Fonctions, Arduino, machines à état
- 5. Tables, moyennes, timers, EEPROM
- 6. Logique, timers, SPI, I2C
- 7. Moteurs, servos, capteurs, multitâche
- 8. Liens MOOC

Le texte équivalent pour Energia/MSP430G se trouve sous http://www.pyr.ch/coursera/LC3-msp.pdf
3. Variables, tableaux, ports, opérations logiques
3.1 Préalable
Ce document correspond aux exercice libres de la semaine 3 du Coursera “Microcontrôleurs”.
Il complète en profondeur une partie des vidéos. Les sources des programmes sont à disposition sous www.didel.com/coursera/LC3ino.zip
3.2 Variables simples
Une variables est une case de 8, 16 ou 32 bits en mémoire, qui représente des mots positif ou signés. L’effet de certaines instructions n’est pas le même pour chaque type, il faut donc bien choisir le type de la variable et en tenir compte. Il y a plusieurs noms pour chaque type, ce qui est troublant. Nous utiliserons les noms en gras. La norme C recommande les noms de la première colonne. On peut assigner un autre nom à un type (typedef), la portabilité de nos programmes n’est donc pas un problème.
| Type C | Description | Type Arduino |
|---|---|---|
uint8_t |
8 bits entier positifs 0..255 | byte unsigned short int |
int8_t |
8 bits entier signés -128..0..127 | char signed short int |
uint16_t |
16 bits entier positifs 0..65535 | unsigned int |
int16_t |
16 bits entier signés -32768..0..32767 | int |
uint32_t |
32 bits entier positifs 0 .. 1069 millions | unsigned long |
int32_t |
32 bits entier signés | long |
| nombre flottant 32 bits signés < 3.438 | float |
|
| 1 bit vrai/faux | bool |
Exemples
byte var1 ; int vit= -4 ; char i, j, toto ;
Une variable doit être déclarée avant d’être utilisée. On peut lui donner une valeur initiale. Par défaut, la valeur est zéro.
On peut lister plusieurs variables de même type sans répéter le type et le ; final.
3.3 Tableaux
Un tableau de variables se déclare comme une variable: il suffit de dire entre [] combien de cases mémoire réserver. Les numéros des cases (index) commencent par 0. Par exemple, int table [3]; réserve 3 mots de 16 bits en mémoire. On peut ensuite écrire par exemple table[2]++; pour incrémenter la 3e variable du tableau.
Attention, dans int table [3]; 3 est une taille exprimée dans le langage courant. Les 3 cases de la table ont comme nom table [0]; table [1]; table [2];. Si par erreur on écrit table [3];, le compilateur accepte, mais la place n’a pas été réservée en mémoire, une autre variable peut s’y trouver et on a un méchant bug!
Si on n’a pas défini la longueur de la table, on peut l’obtenir avec sizeof (nomDeLaTable);
Exemple 3.31
|
On veut calculer la moyenne des valeurs dans une table. On fait la somme et on divise. On pourrait additionner combien d’éléments avant dépassement et erreur du résultat? |
|
Exemple 3.32
|
Dans une table similaire, on veut connaître le minimum et sa position (son index dans la table). On part d’une valeur minimum la plus grande possible, selon le type. Si la première valeur est plus petite, on substitue et mémorise l’index. Modifier ce programme pour afficher le maximum et son index. |
|
3.4 Ports
Comprenons comment le processeur interagit avec les pins, et en particulier avec celles du LearnCbot.
|
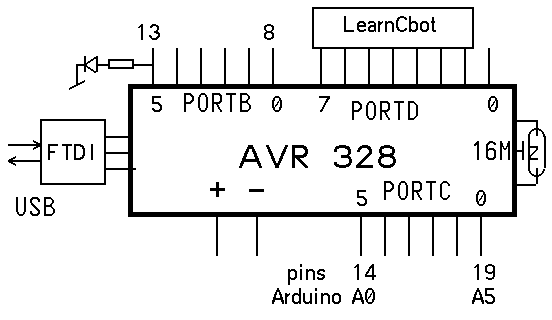
La carte Arduino/Diduino a un processeur AVR Atmega328 avec son quartz 16 MHz et son interface USB. Le processeur a trois ports:B,C,D, accédés comme des variables 8 bits. Dans chaque port, les bits sont numérotés de 0 à 7, 0 à 5 pour les ports B et C, qui sont incomplets. Arduino a numéroté ces pins de 0 à 19. Le LCbot est câblé sur le port D. Sur ce port, les numéros de pins et de bit sont identiques. |
|
|
|
|
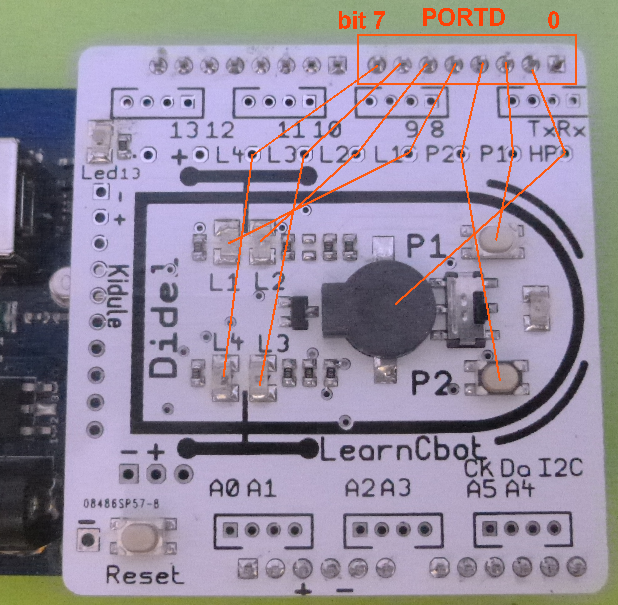
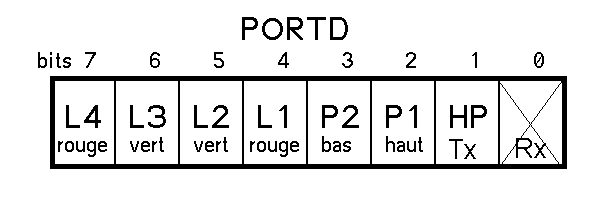
Pour le LearnCbot, ce port D doit être programmé avec 5 pins en sorties et 2 pins en entrées. Les pins 0 et 1 sont réservées pour la communication série avec le circuit FTDI. Le HP partage la pin Tx, ce qui n’est pas gênant pour les exercices. Juste un peu bruyant quand la communication série travaille avec le haut-parleur activé.
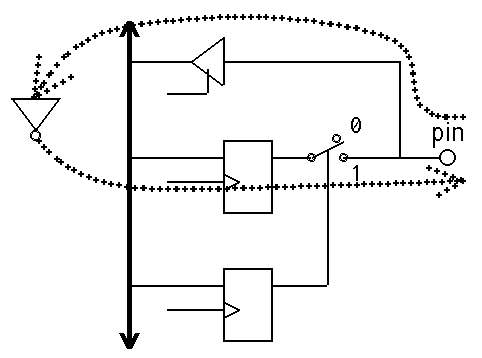
Pour dire que certaines pins sont en entrées et d’autre en sortie, il faut configurer le port et cela se fait dans le set-up. Le port D est un ensemble de trois “registres” qu’Arduino a caché, mais qu’il est temps de comprendre. Analysons le schéma logique pour une pin.
|
Le PORTD mémorise l’information que l’on veut écrire sur un pin. Mais cette information ne vas pas nécessairement passer sur la pin. La fonction Arduino La fonction Arduino Pour lire une pin, on passe par le registre |
|

|
Donc pour allumer la Led de la pin 4 il faut mettre un 1 dans les bascules correspondantes des PORTD et DDRD. La lecture sur PIND doit relire un "1". Si on relit un "0", il y a court-circuit (cc)! Pour lire la pin2 il faut mettre un 0 dans DDRD. Que se passe-il si on met un “1” ? |
|
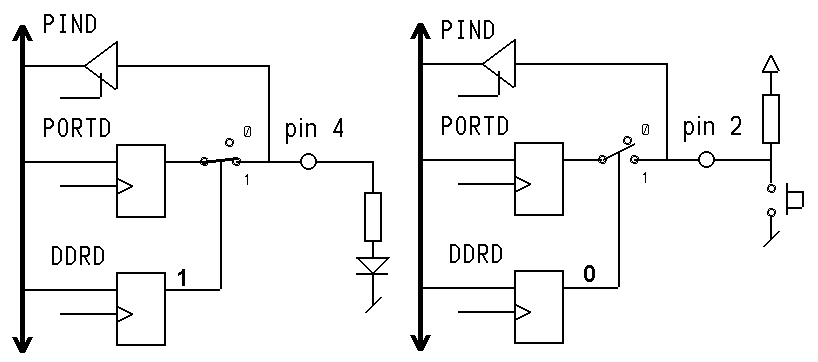
1er cas: la bascule PORTD bit 2 est à “0”. Le courant de la résistance est absorbé par cette bascule, comme quand on agit sur le poussoir. On lit toujours un zéro.
2e cas: la bascule PORTD bit 2 est à “1”. On lit un “1”, mais ce n’est pas la résistance qui fournit le courant, c’est la bascule. Attention, si on presse sur le poussoir, on court-circuite la sortie de la bascule qui fournit du courant avec une résistance interne de 50 Ohm environ. On lit un zéro, mais un courant de 50 mA circule dans la bascule et le poussoir; le transistor de sortie chauffe et peut se détruire si le court-circuit dure quelques secondes. On pourrait ajouter une résistance de limitation de courant, mais elle dégraderait d’autres caractéristiques. Alors, apprenons à programmer plutôt que de compliquer les schémas.
Exemple 3.41
|
On veut vérifier qu’il n’y a pas de cc sur la sortie qui commande la led L1. Compléter l’exemple pour afficher sur le terminal ce que l’on écrit et ce que l’on relit. Pour tester, il est permis d’utiliser un fil et de faire court-circuit avec le Gnd/0V ou le 5V pendant une seconde au plus. |
|
Exemple 3.42
|
Clignoter les 4 leds est facile et garanti la simultanéité. Modifier ce programme pour faire clignoter alternativement les Leds vertes et rouge. |
|
Ce que l’on vient de programmer est brutal. On a forcé en entrée les pins 0 à 3 sans se demander s’il y avait un effet secondaire sur Tx Rx en particulier. Pour n’agir que sur certains bits, il faut avoir bien compris les opérations logiques.
3.43 Remarque
|
On a vu que pour inverser une pin, il faut écrire La figure montre ce que fait le processeur: lire, inverser, écrire. Si on veut inverser tout le port, on code On verra plus loin comment agir sur une seule pin. On remarque la différence de notation entre l’inversion booleenne, signe |
|
Pour ceux qui maîtrisent les opérations logique, le document www.didel.com/C/OperationsLogiques.pdf est une bonne révision, le document est plus compact que ce qui suit (il n’a pas d’exemples).
3.5 Opération logique booléennes
Les fonctions logiques ou booléennes agissent sur un ou deux bits et sont résumées ci-dessous. Des symboles logiques sont utilisés dans les schémas électroniques.
|
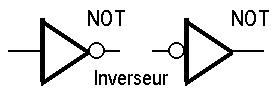
Not Le résultat a la valeur inverse de l’entrée. |
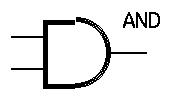
And Le résultat vaut 1 si les deux entrées sont à 1 |
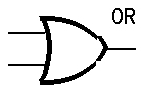
Or Le résultat vaut 1 si l’une des deux entrées est à 1 |
Xor ( Le résultat vaut 1 si les deux entrées sont différentes |
|
Inverseur
|
Porte ET
|
Porte OU
|
Ou exclusif
|
Ceci s’applique dans des expressions conditionnelles, dans un if(), un while(), etc. On peut écrire if (toto || titi) {instr;}. L’instruction sera exécutée s’il y a au moins un bit à 1 entre les 2 mots toto et titi. Donc elle n’est pas exécutée que si les deux mots sont à zéro. Si la valeur du mot est 0 (booléen faux), le bit est 0. Si la valeur est différente de zéro (vrai), le bit vaut 1.
On se souvient que faux ==0 et vrai !=0 (différent de 0).
Exemple 3.51
|
L’exemple A292.ino compte et décompte. On veut que la Led1 s’allume seulement si on pèse sur P2 quand on se bloque à zéro. Le programme ci-contre est faux! L’idée est juste, mais on s’est bloqué dans le précédent if avec le C’est dans cette attente qu’il faut intervenir. A vous de corriger et tester le programme |
|
3.6 Opération logique bit par bit (bitwise)
Ces opération sont effectuées par le processeur sur des mots de 8 bits. Dans l’unité arithmétique et logique (ALU) on trouve 8 portes ET en parallèle, etc.
L’opération et dite “bit-à-bit” (bitwise). Les opérateurs sont ~ (not) & (and) | (or) ^ (xor). On met aussi dans cette catégorie les décalages >> <<.
Not ~ |
And & |
Or | |
Xor ^ |
|---|---|---|---|
|
|
|
|
|
Attention, -a complément arithmétique de a, n’es pas égal à ~a, complément bit à bit de a
Dans les exemples ci-dessus, la lettre m évoque la notion de masque. Souvent, une partie des bits dans une variable, sur un port, doit être masquée, seuls d’autres bits sont significatifs, ou le masque est vu comme une passoire pour garder certains bits.
Exemple 3.61
|
On veut faire le Xor de deux mots de 8 bits sans utiliser le Xor. L’opération c’est pour chaque bit l’un ou l’autre, pas les deux. Exemple en 4 bits:
Le AND du 1er résultat avec l’inverse du 2e donne
Modifier le programme pour ne pas utiliser la variable xor, puis ne pas utiliser la variable and, puis aucune variables (cela fait plusieurs parenthèses imbriquées!). |
|
3.7 Décalages
On peut décaler un mot binaire de type entier 8,16,32 bits à droite avec les opérations “shift right”, signe >> ou à gauche avec “shift left”, signe <<.
|
|
|
|
|
Exemple 3.71
|
Ce programme décale à droite de 4, puis à gauche de 4. Quel est le résultat? Ecrire le programme plus simplement avec une seule opération logique. |
|
Exemple 3.72
|
On veut allumer les Leds L1 .. L2 dans l’ordres en agissant directement sur le PORTD, sans faire une boucle for avec réinitialisation tous les 4 décalages. Ici, la boucle test après chaque décalage si la partie Leds du PORTD est vide, et effectue la réinitialisation. Ecrire PORTD = etatLed; fonctionne ici, mais cela forcerait les 4 bits de poids faibles à zéro sans se préoccuper si cela a une conséquence sur ces pins. La nécessité de ces deux instructions de masquage est bien expliquée dans .www.didel.com/C/OperationsLogiques.pdf |
|
3.8 Décalage arithmétique
Décaler à droite revient à diviser par 2, mais on va voir qu’il ne faut pas utiliser les décalages pour faire des opérations arithmétiques. Mais c’est une bonne occasion de mieux comprendre les problèmes de dépassement de capacité que le compilateur C ne peut pas signaler.
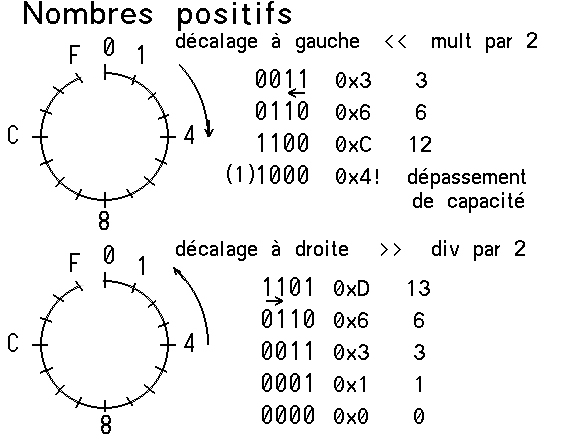
3.81 Décalage de nombres binaires (positifs)
|
Comprenons avec des nombres de 4 bits, qui peuvent représenter des nombres de 0 à 15, 0 à 0xF en hexadécimal. Décaler à gauche multiplie par 2, mais il y a rapidement dépassement de capacité puis résultat nul. Décaler à droite divise par 2, mais il y a rapidement un résultat nul |
|
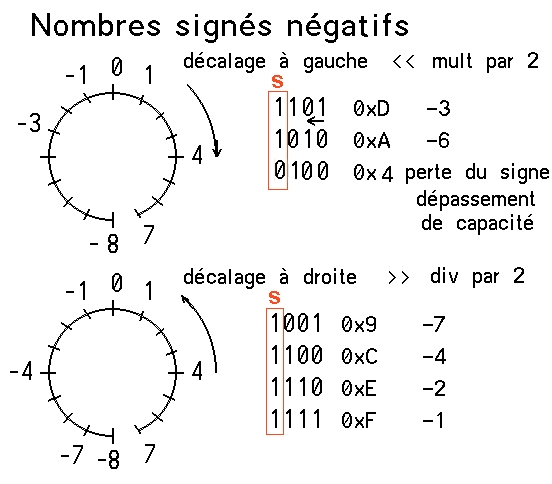
3.82 Décalages de nombres arithmétiques (signés)
|
La compréhension est plus délicate pour les nombres signés, lorsqu’ils sont négatifs. Le bit de poids fort (MSB Most Significant Bit) est le bit de signe, toujours 0 si le nombre est positif, 1 si négatif.. Avec 4 bits, on peut représenter des nombres signés de –8 à +7. Décaler à gauche multiplie par 2, mais pour les nombres négatifs, il y a extension du signe. Décaler à droite divise par 2, pour les nombres négatifs, il y a conservation du signe. |
|
Le compilateur gère les décalages selon le type de donnée et il faut éviter de décaler des types signés sans bien savoir ce que l’on fait. Si on multiplie ou divise par 2, 4, 8, . . le compilateur utilise des décalages, plus rapides que la division.
3.9 Positionner un bit 1<<n
L’opérateur de décalage est souvent préféré pour décrire un mot binaire.
Si on écrit “1” le compilateur voit le nombre binaire 0b00000001.
Pour 1<<3 il calcule 0b00001000. 1<<5|1<<0 est équivalent à 0b00100001.
Pour décrire les masques associés à des périphériques ou des modes il faut donner des noms aux lignes bits et utiliser cette notation. Par exemple, on a 2 sorties sur un port: un moteur sur le bit 3 et un servo sur le bit 5. La valeur à donner au registre de direction (processeur AVR ou MSP) est 0b00101000. C’est du charabia! 0x28 ou 40 (décimal) est pire. Il faut déclarer
#define bMot = 3
#define bServo = 5
mPort = 1<<bMot | 1<<bServo ; // mPort sera utilisé pour assigner le registre de direction
A noter qu’écrire mPort = (1<<3) | (1<<5); est aussi du charabia!
Exemple 3.91
|
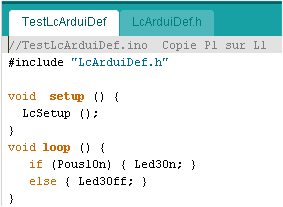
Reprenons l’exemple simple qui copie P1 sur L1, mais en utilisant des définitions C. On remarque la notation bP1 pour nommer le bit 2 dans le PORTD. On avait nommé P1 la pin Arduino, qui “par hasard” a le même no. Ajouter les définitions pour P2 et utiliser P1 pour allumer, P2 pour éteindre. Recharger le programme A223.ino qui fait la même chose et comparer les tailles mémoire. |
|
3.10 Action sur des bits
Arduino/C définit 3 fonctions qui modifient un bit, sans toucher les bits d’à côté et qui font donc ce que l’on vient de voir.
bitSet (var,no); var |= (1<<no); // mettre le bit à 1
bitClear (var,no); var &= ~(1<<no); // mettre ce bit à 0
bitRead (var,no); var & (1<<no) // tester si ce bit vaut 0 ou 1
Attention, le ; à la fin de la 3e expression n’a pas été oublié. Les deux premières lignes concernent des actions, des instructions. La troisième intervient dans une condition
if (bitRead (var,no)) { } ou if (var & (1<<no)) { }.
Ces fonction ne sont pas connues des “vrais” compilateurs C, mais elles sont faciles à définir pour que le programme transporté soit compatible.
3.11 Surveiller un changement
Le rôle fréquent d’un microcontrôleur est de réagir à un changement de l’environnement. Toutes les x millisecondes, le contrôleur peut mémoriser l’état et x millisecondes suivantes il compare, active des variables qui déclenchent des actions.
Prenons comme exemple surveiller les 2 poussoirs P1 P2 pendant que l’on clignote L1. On peut faire des if sur chaque poussoir, ce qui n’est pas très élégant avec un clavier complet.
Dans une boucle de 20 ms on clignote tous les 10 fois et on lit les 2 touches, ensembles sur le PORTD. 20 ms plus tard, on relit et on compare avec la valeur précédente qui a été mémorisée. Il faut mettre en place un joli jeu de variables et de masques. A chaque ligne de l’exemple simple qui suit, vous verrez que vous n’avez pas encore bien assimilé ce qui précède! Accrochez-vous, c’est le B A BA du C !
Exemple 3.111
|
La variable prevPous mémorise l’état des 2 poussoirs. Un masque ne garde que les 2 bits qui nous intéresse. Il faut initialiser prevPous dans le setup, autrement le premier passage dans le programme pourrait signaler un changement. Il faut immédiatement copier le nouvel l’état dans l’ancien, mais il faut aussi les comparer avant mise à jour. Cela oblige à créer une variable pour ne pas relire deux fois l’état des poussoirs, qui peut changer chaque microseconde. S’il y a changement, on clignote une autre led en modifiant le masque qui sélectionne la led – admirez l’élégance de la solution ! .Au démarrage, clignotez L1 et L4. |
|
Résumé
La compréhension des opérations logiques est très importante pour maîtriser le C temps réel et se préparer à des applications qui gèrent plusieurs capteurs.
Le débutant hésite souvent sur les bons signes à utiliser. Notre feuille résumée compacte se trouve sous www.didel.com/C/Resume.pdf
3.12 Fichier de définitions
On s’embête à lister au début de chaque programme les définitions associées au matériel utilisé. Rassemblons toutes les définitions qui concernent le LearnCbot dans un seul fichier, que le concept de “croquis” d’Arduino permet de cacher dans une librairie personelle.
Cette définition du matériel peut se faire a la “Arduino” en raisonnant sur les pins et en appelant des fonctions qui prennent du temps et de la place mémoire. Regrouper ces définitions qui dépendent de la carte microcontrôleur (ici Arduino ou MSP430G) rend les programmes portables, ce qui est le premier but du C.
Les définitions qui concernent le LearnCbot peuvent s’écrire en “Arduino” ou en “C”, ce qui ne change rien dans le programme principal, à part le temps d’exécution et la taille du code.
|
|
3.12 Librairie et fichiers de définition
On ne doit garder dans le programme principal que la partie propre à l’application. Les définitions permettent d’oublier le câblage, caché dans une librairie.
Il faut distinguer les librairies locales, appelées par un #include "MaLibrairie.h" et les librairies globales, mises à disposition de toute la collectivité et rassemblées dans le dossier librairie d’Arduino et appelées par un #include <lib.h>. Les librairies globales sont difficiles à créer. On utilisera seulement des librairies de définition locales, inclues chaque fois dans le croquis du programme. Les programmes deviennent très clairs.
|
|
|
jdn 140511